
Projects
Optimization, Verification, and Timing Analysis of F1-Tenth Autonomous Racing Vehicles (Guo)
This project is based on the 1:10-scale autonomous racing platform. We design ML-based and model-based control algorithms for racing, analyze scheduling algorithms for ROS2 and the CPU-GPU platform, and verify system correctness via timing analysis and model checking. A series of works have been published in premier venues such as RTSS, EMSOFT, RTAS, DAC, TIST, etc. Our F1-Tenth team ranked 4th in time-trial and 5th in head-to-head racing in ICRA 2022, 1st in the total # of laps and 3rd in time trials in CPS-IoT Week 2023. This project is/has been supported by NSF CNS, NSF SHF, NSF CPS, NVIDIA, and internal grants at NC State.

Wearable and Wireless Sensing and Real-Time Control for Ubiquitous Healthcare (Guo)
This project aims to integrate wireless sensing, tiny wearable sensors, machine learning, real-time control, and robotics into a ubiquitous healthcare system. Various CPS core problems/techniques are correlated, such as motion capture, motion prediction, environmental sensing, real-time machine learning, data transfer, and knowledge distillation. Specifically for the short term, we target people with lower limb amputation or heart disease. A series of works have been published in premier venues such as ICCV, AAAI, IJCAI, JBHI, TNNLS, etc. This project is/has been supported by NSF FRR, NSF FW-HTF, NHK, and internal grants at NC State.

Next Generation Compression for AI-driven IoT, Autonomous Vehicles and Medical Systems (Wen)
This project aims to develop data compression techniques (i.e., image, video) guided by machine perception, rather than human perception, catering to the increasing AI-powered machine-to-machine systems. It targets various applications with low-latency AI processing requirements: 1) IoT and sensing systems; 2) remote AI-assisted medical diagnosis and surgery; 3) cooperative perception in connected and autonomous vehicles. The project has led to publications in top venues like DAC, CVPR and premier medical imaging conference-MICCAI, as well as open-source frameworks.


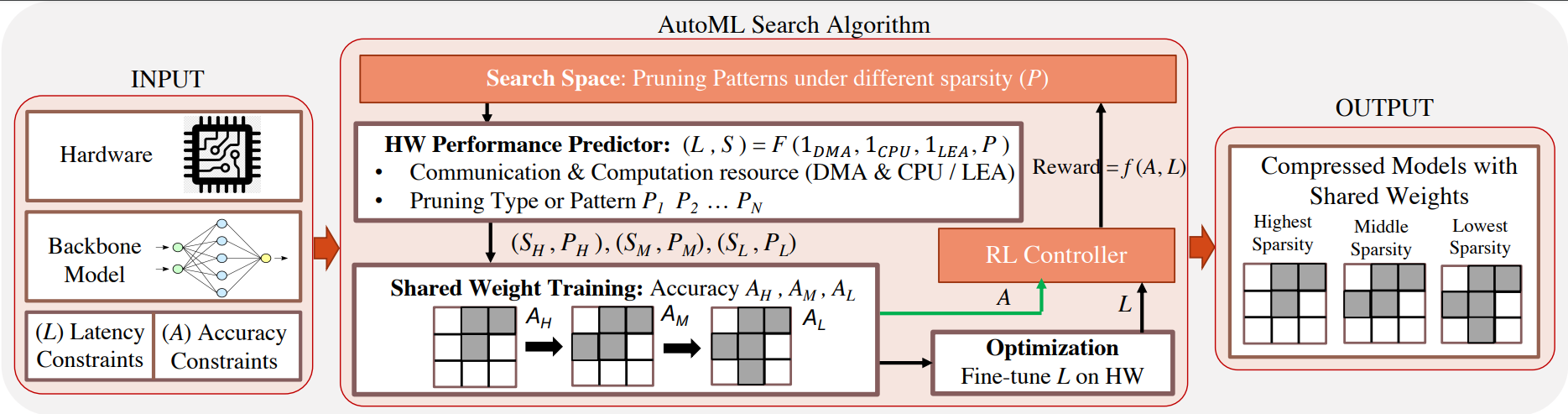
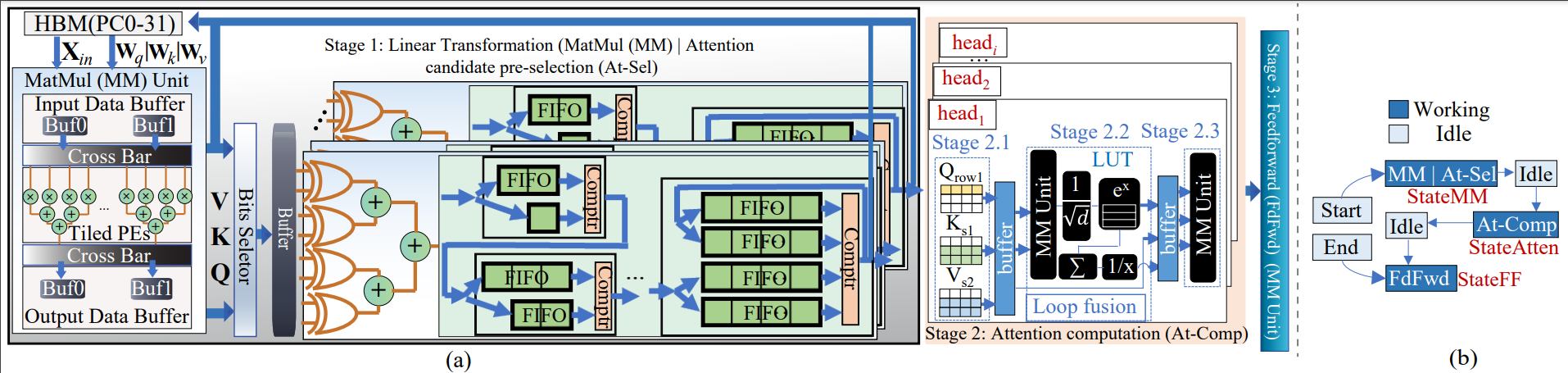
Efficient, Implementable Computing and Design Automation (Wen)
This project endeavors to develop efficient computing and deployment automation solutions, constituting a fundamental pillar in the realm of modern intelligent CPS. It focuses on software-hardware co-design techniques to facilitate real-time machine learning on platforms with diverse resource constraints, such as ML model compression and sparsity algorithms for tiny energy harvesting devices, and autonomous vehicles, processing-in/near-memory architecture, and FPGA hardware design. A series of works have been published in top conferences such as DAC, ICCAD, HPCA, EMSOFT, ECCV, AAAI, ICML. The project is partially supported by NSF SPX, NSF SHF etc.
Affordable Trustworthy and Private Computing (Wen)
This project aims to develop algorithm-hardware co-optimized computing paradigms for secure and privacy-preserving AI services under predefined performance and resource constraints-a common scenario in smart CPS. Specific techniques include machine learning algorithm, hardware architecture and trust execution environment, homomorphic encryption, multi-party computing, differential privacy, federate learning etc. A collection of works has been disseminated in top venues such as DAC, MICRO, NeurIPS, ICML, USENIX Security, S&P (Oakland), ACSAC, HOST. The project is partially supported by NSF Career and NSF SaTC Medium grants.
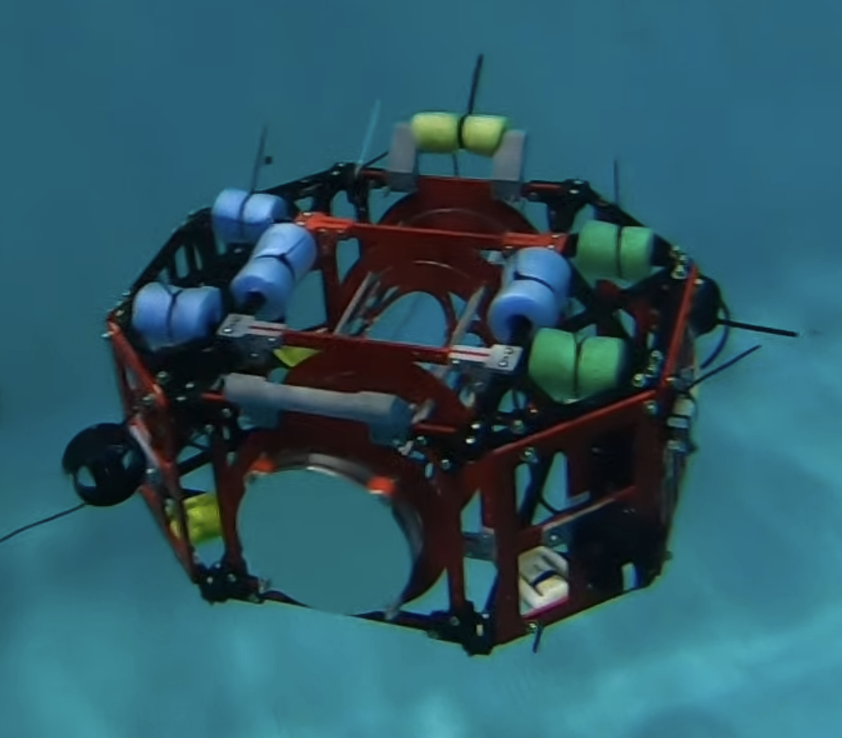
Development of a Customizable Fleet of Autonomous Co-Robots for Advancing Aquaculture (Ore)
Aquaculture is the fastest-growing protein sector in the world, and an existing $14 billion seafood deficit in the US is driving efforts to develop new, larger nearshore marine aquaculture systems to meet national demand. The vision of this project is to transition nearshore mariculture to an efficient and sustainable industry through developing an adaptable and customizable, surface and aerial vehicle fleet for smart monitoring, integrated with a framework for accelerated robotic software prototyping, using oyster production in North Carolina as a case study and testbed. The project is supported by NSF (USDA).

Lightweight Robot System Test Creation and Automation (Ore)
The rapid expansion of robotics relies on properly configuring and testing hardware and software. Due to the expense and hazard of real-world testing on hardware, robot system testing increasingly utilizes extensive simulation. Creating robot simulation tests requires specialized skills in robot programming and simulation tools. While there are many platforms and tool-kits to create these simulations, they can be cumbersome when combined with automated testing. We seek to leverage the visual 3D manipulation toolkits used in computer game engine design to create visual test oracles that have a logical structure, such as goal ordering and Boolean logic to define “must reach” and “must avoid” regions.
